Time-of-Flight 3D Scanner
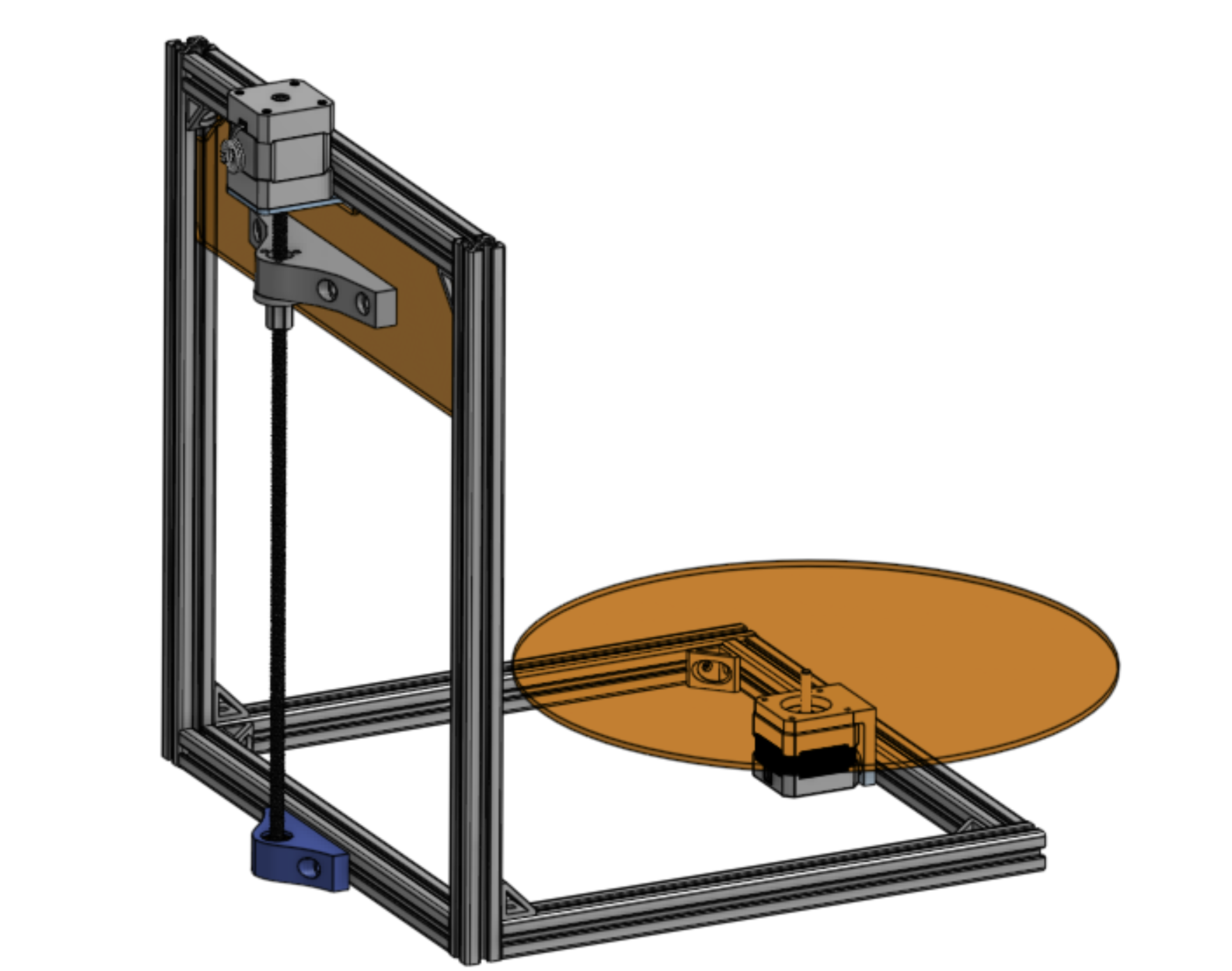
As part of a class project for MIT's Electronics for Mechanical Systems II (2.679), I designed and prototyped a platform capable of:
• Rotate a base platform and lift a ToF Sensosr using stepper motor control.
• Using distance measurements of a rotating object to create a 3D point cloud.
• Record and plot those points using Matplotlib on Python using a Raspberry Pi 4.
__________________________________________________________________________________________________________________
Further Work / Next Steps (ongoing):
• Recording more reliable stepper motor position using encoder data.
• Collecting more data points and implementing a Voxel filter on point cloud.
• Converting point clouds into meshes and exporting as STL files for 3D printing.